Force Driven Robot Arm
I recently built a Robot Gripper Project which is force driven. This means that each joint is attached to the actuator with a spring and we can measure how much force is being exerted by measuring how much the spring stretches.
There were some issues with this design as indicated in the video, so I set about designing a larger force controlled hub for a bigger arm project:
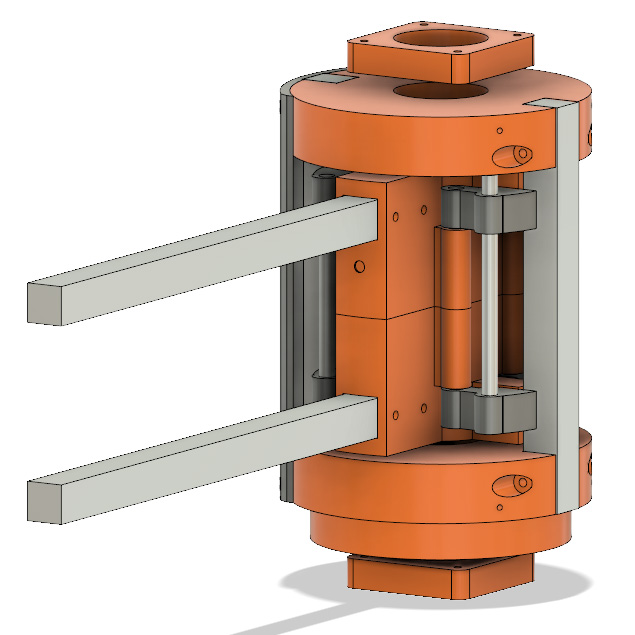
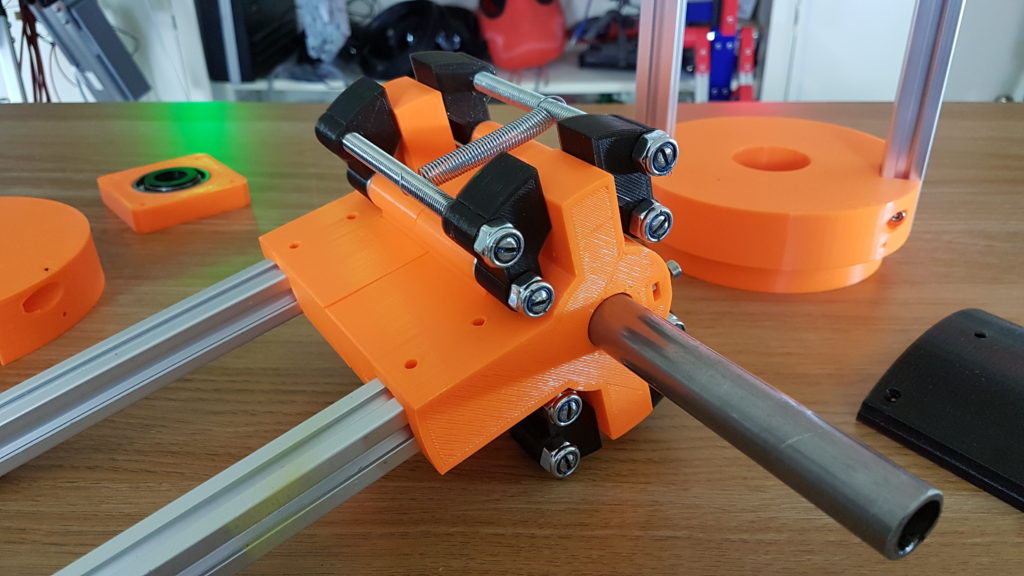
The parts are 3D printed with the exception of some 2020 extrusion and some M8 studding:

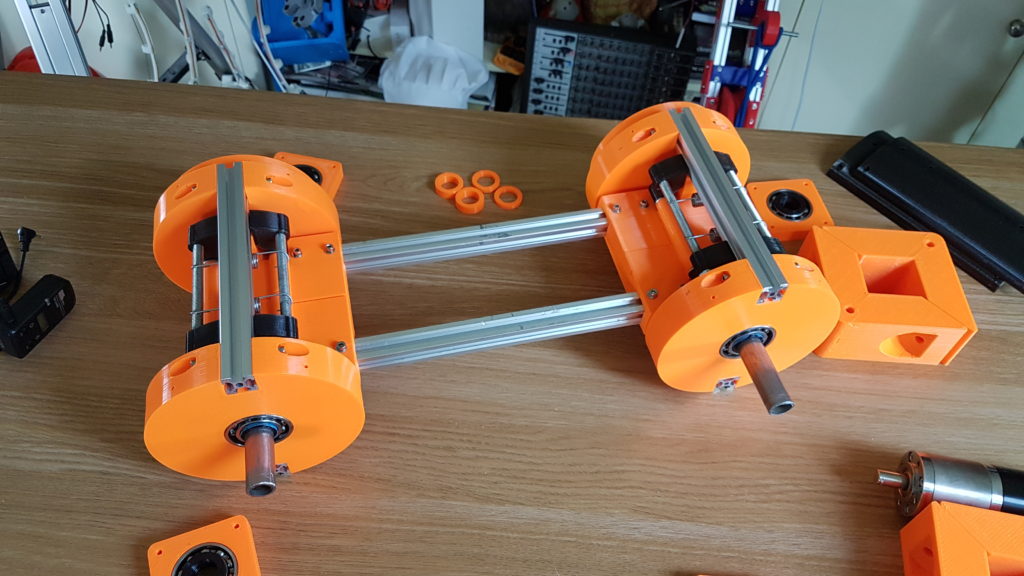
I built two of these hubs for the two axis of a SCARA arm.
The stand is welded steel and the mounts are CNC aluminium. I’ve used a motor with a reto-fitted encoder:
The next stage is to put feedback on the joints so we can measure the difference between the motor position and actual joint position.
More to follow…
Related Posts




About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More