Upper Torso
Project Ultron – A Real Robot!
This page is about the upper torso, check out the main project index for the rest.
There are some YouTube videos about this section
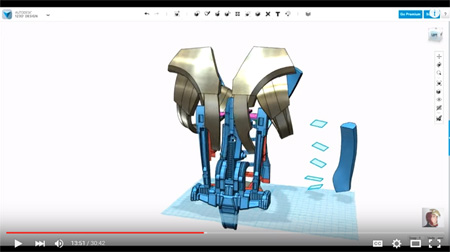



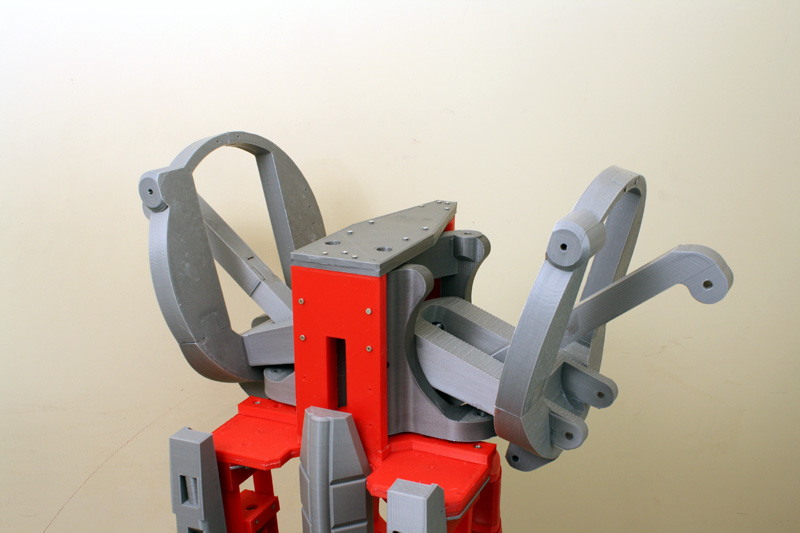
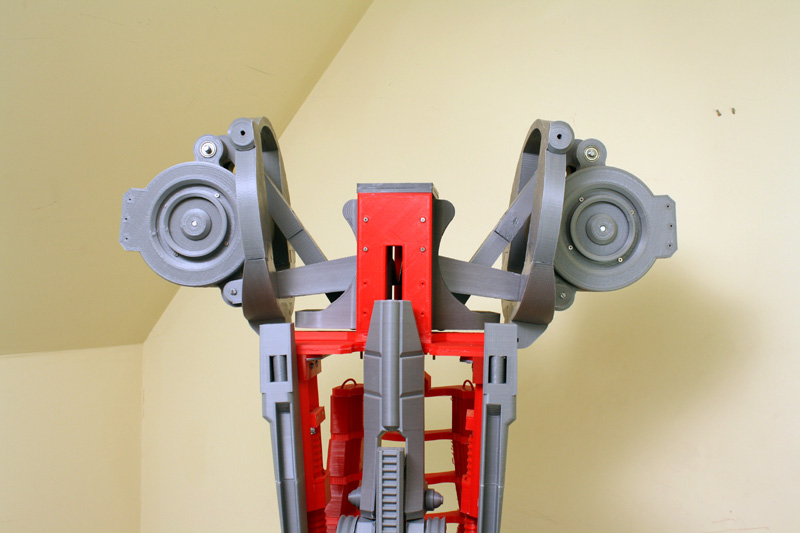
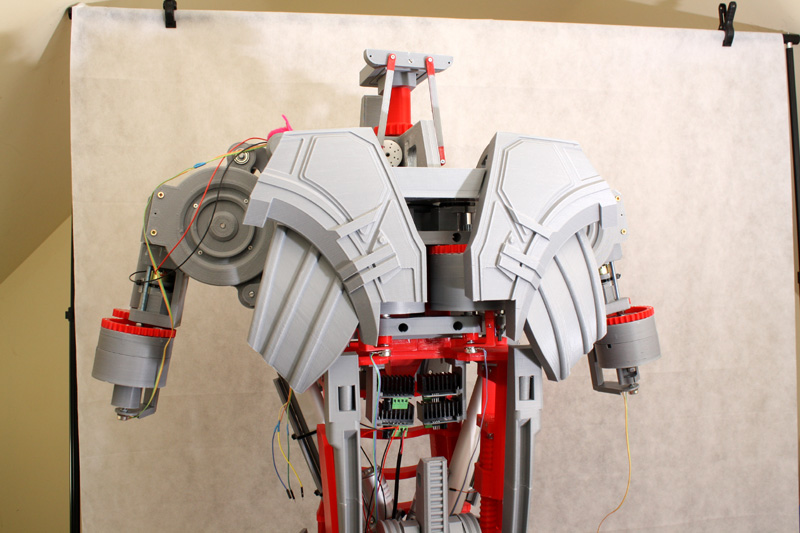
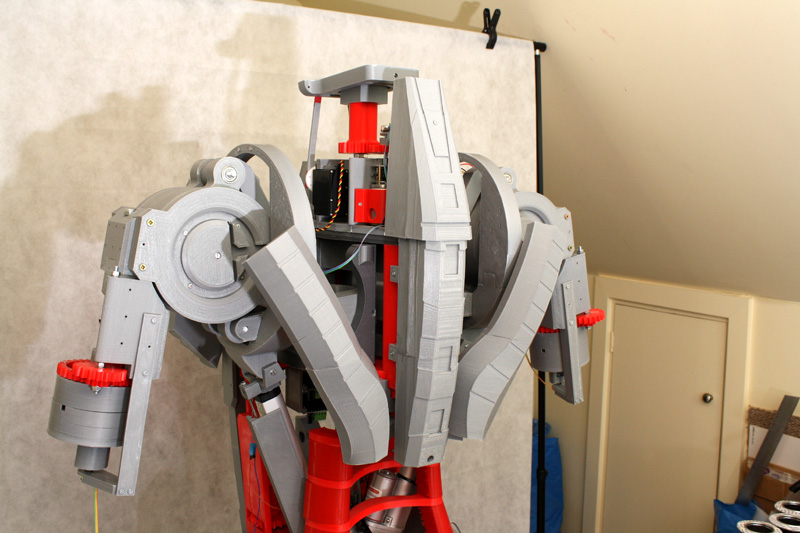
The Upper torso consists of the shoulder mechanism. I built out the approximate scale of Ultron in CAD so I can make the mechanics fit:
The shoulder has various linkages to allow the arm and shoulder to lift together:



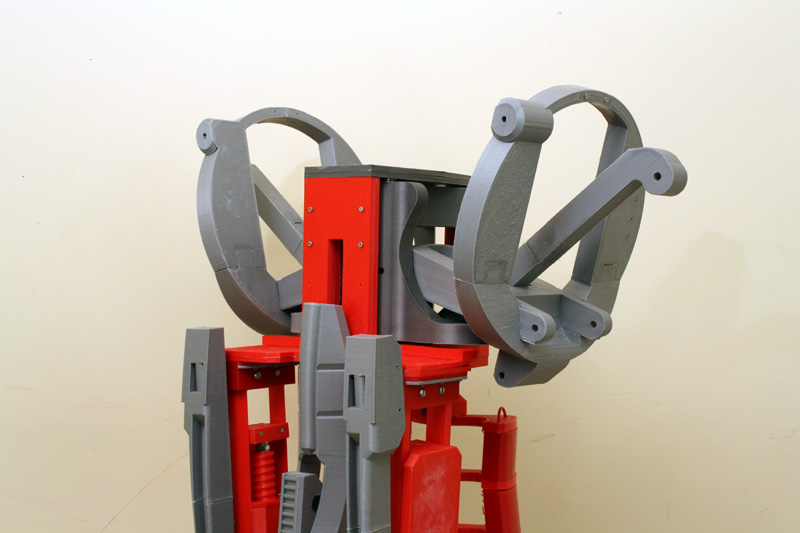
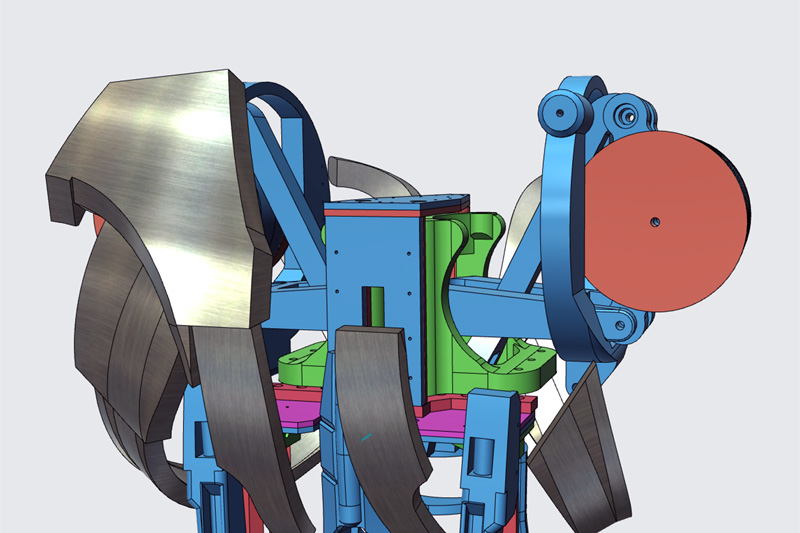
The Shoulder hubs have more travel due to the leverage angles:
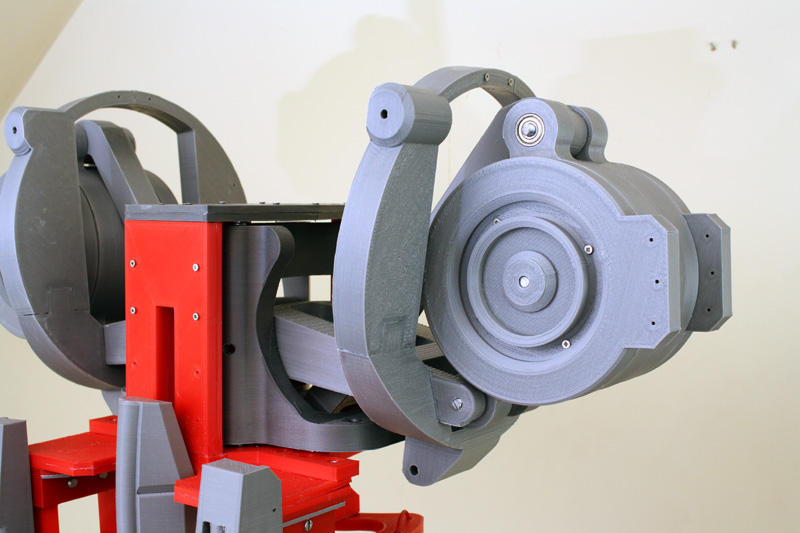
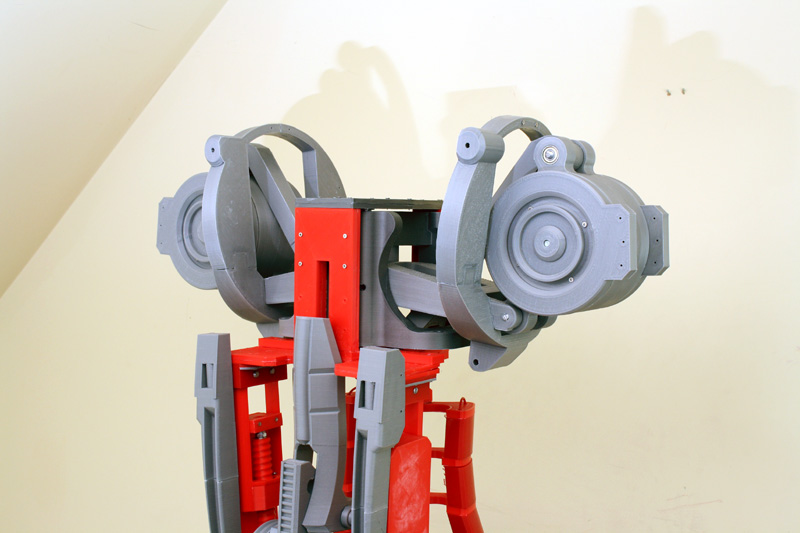
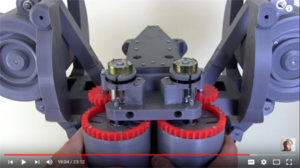
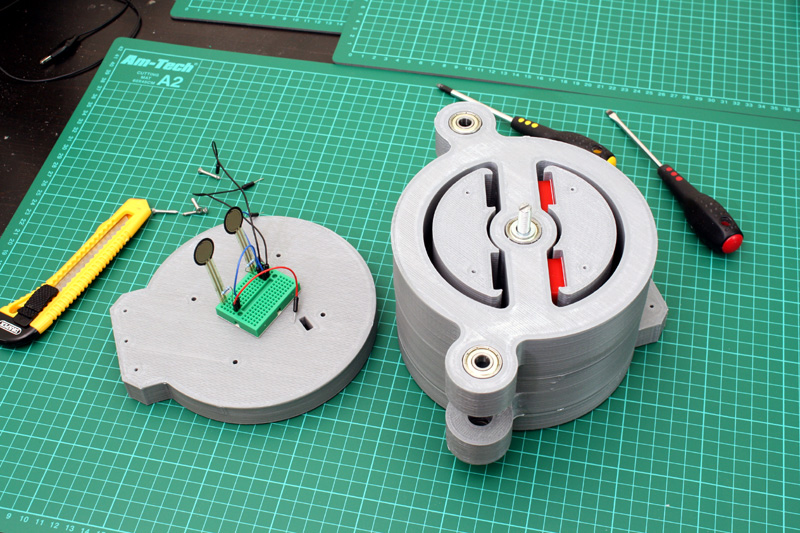
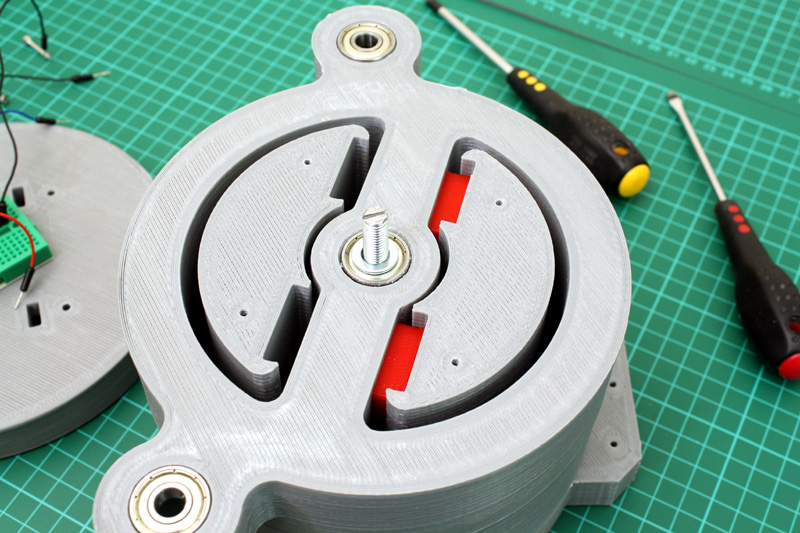
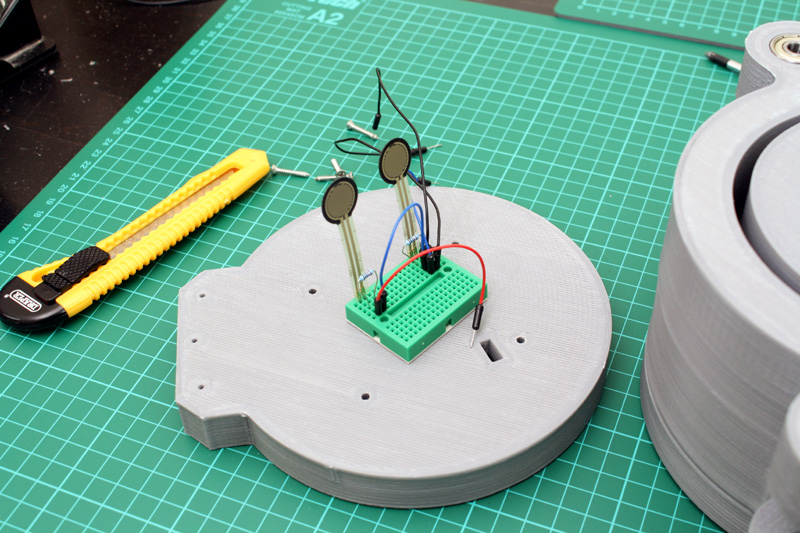
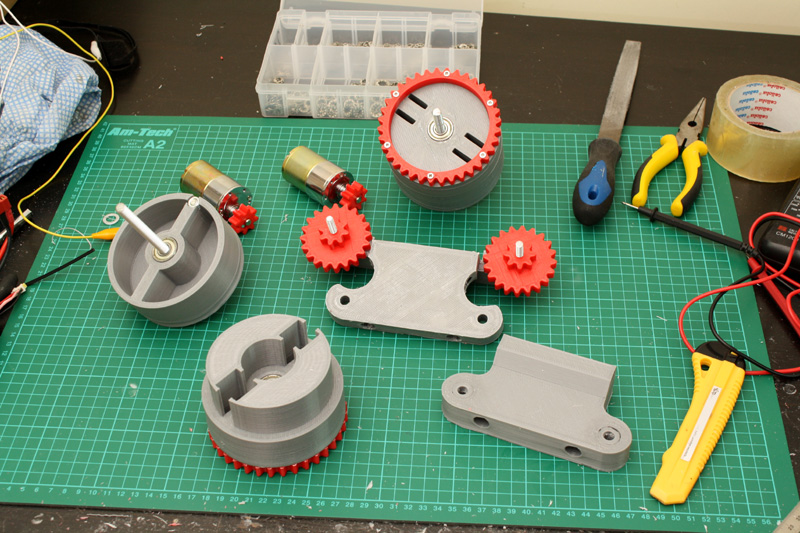
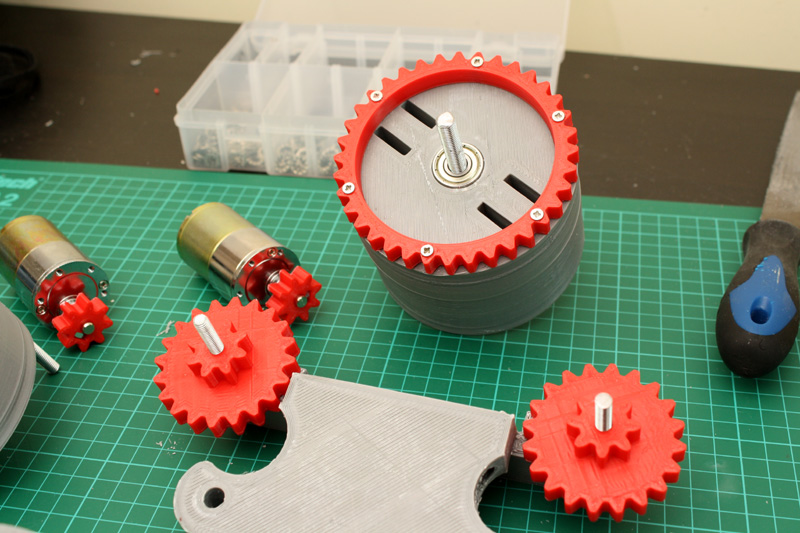
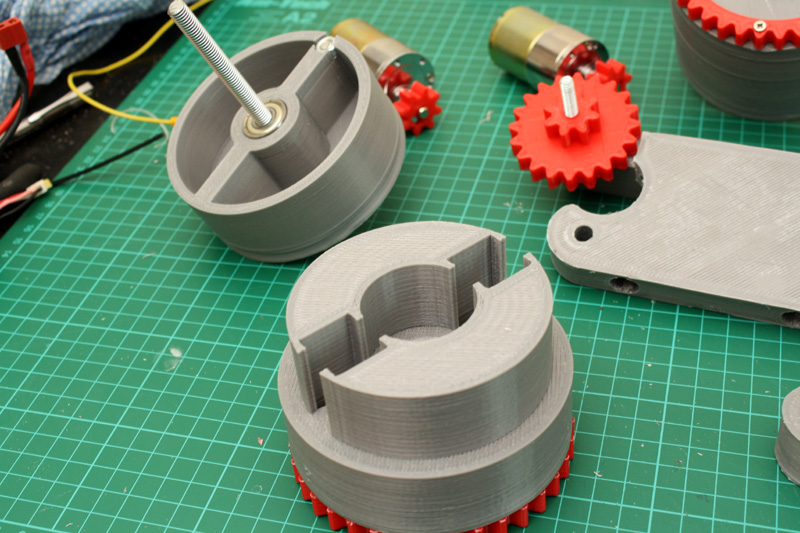
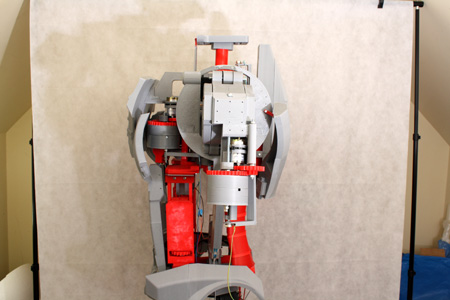
Each shoulder hub is made from two pieces that can turn against each other. This will squash some material sandwiching some force sensitive resistors which can be tuned by adjusting the material. The result is that the shoulders can be used as series elastic actuators for force feedback on the joint:
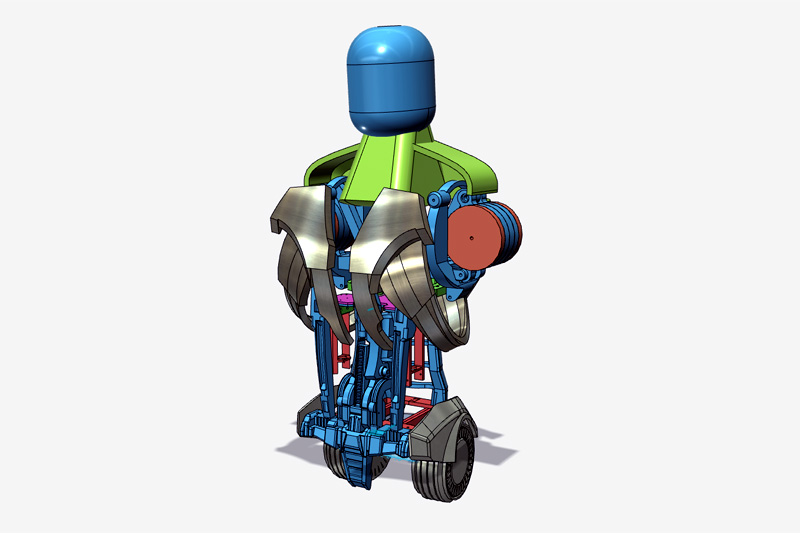
The shoulders also need to move backward and forwards, so another two motorised series elastic actuators are required:
These fit just inside the chest cavity:



I’ve added some ‘practical cosmetics’ to hold electronics, check out the video above for more info:
Related Posts




About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More