Parts & Concept
Star Wars EP7 BB-8 Droid
This page is about the parts and main assembly, check out the main project index for the rest.
There is a YouTube video about this section
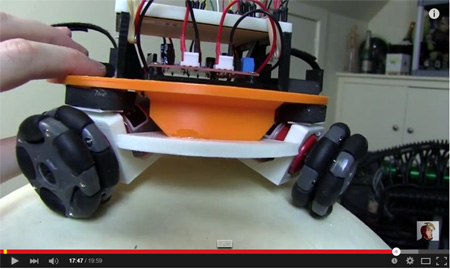
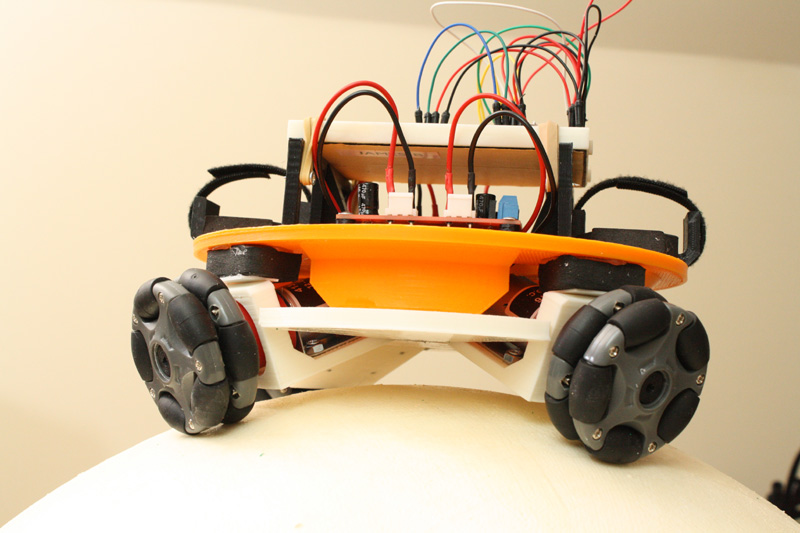
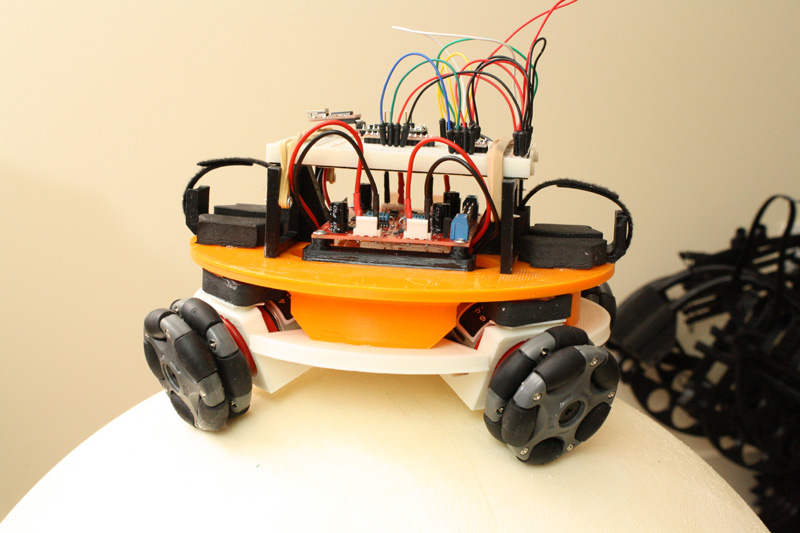
My concept for this droid is to build a ‘ball balancing robot’ which actively balances on a ball using Gyros and Accelerometers. The ball is light weight because it’s made from expanded polystyrene which means it doesn’t have much inertia. The robot will be heavier which will make it more stable because it will have a larger inertia. I’m using omni-directional wheels so that the robot can move in any direction to keep balance.


I have the following parts from Sparkfun electronics:
IMU: https://www.sparkfun.com/products/12636
Arduino Pro Mini 5v: https://www.sparkfun.com/products/11113
FTDI adapter: https://www.sparkfun.com/products/9716
Motor driver: https://www.sparkfun.com/products/11593
Level shifter https://www.sparkfun.com/products/12009
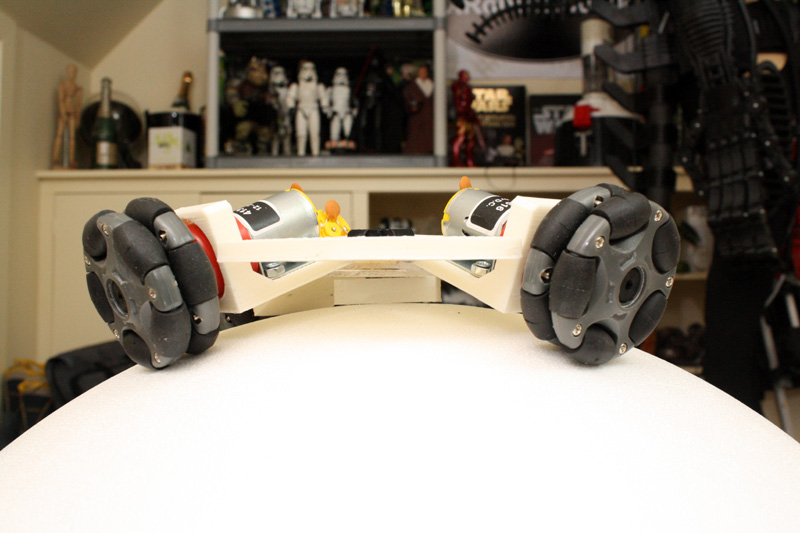
Motors are 100:1 918D gearboxes from MFA Como Drills ( NOT the ones pictured)
Wheels are 58mm Omnis from: Warburton Technology
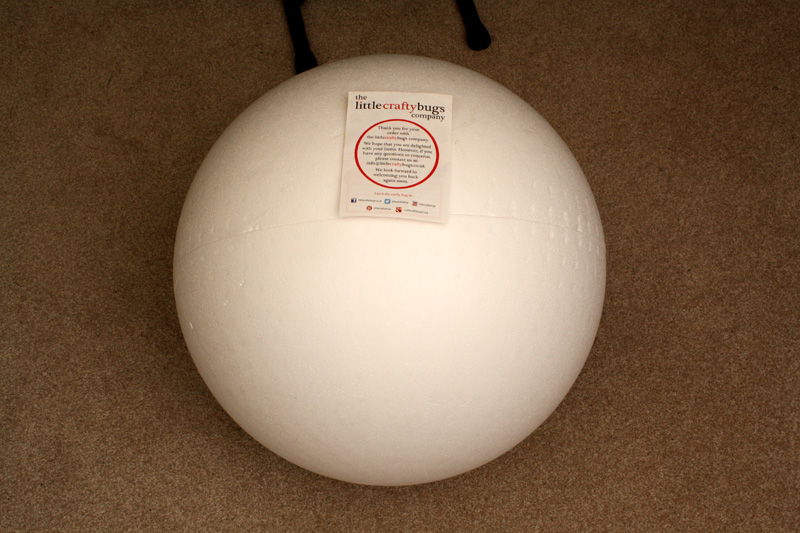
500mm diameter Polysyrene ball was bought from eBay, shipped by LittleCraftyBugs



The rest of the chassis parts are 3D printed:
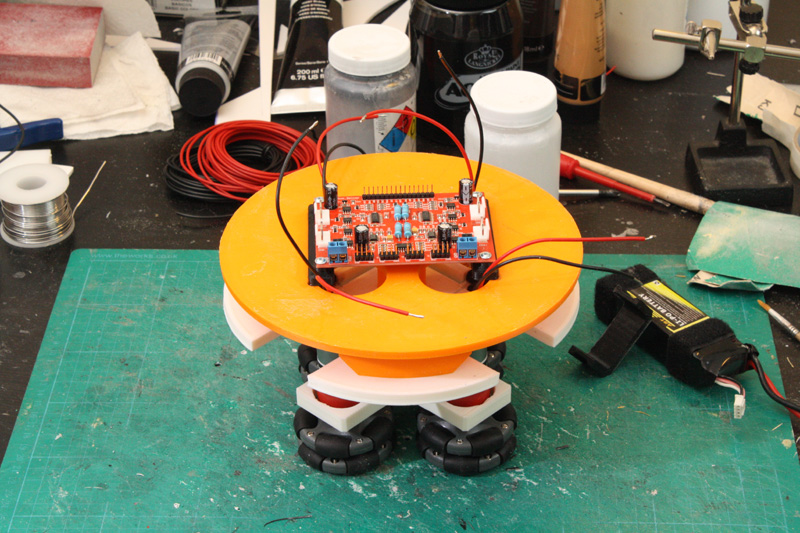

I’ve mounted the electronics on various 3D printed chassis parts, and also left space for a pair of 11.1v 3 cell LiPo batteries:

More to follow…



About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More