Android 12 Hip Assembly
Android 12 Hip assembly.
This page is about Android 12’s hip assembly, check out the project index for the rest.
As with the rest of the android, all of the parts will be 3D printed, so my initial work is to design the pieces in CAD. I’m usingAutodesk 123D, which is free software. There will be some YouTube videos for this section, or scroll down for pictures and words.

This section is where the fun starts, because the legs have to move in three degrees of freedom, which means the hips must have at least three parts that move against each other. Due to their size, some of the parts will be made of multiple 3D prints attached to each other with studding and nuts.
Here are the main hip parts that allow the legs to pivot from side to side, they are pictured upside down here. They also connect to each thigh hinge on top (which will be on the bottom). The thigh will be at least two separate parts attached to the studding on the legs.
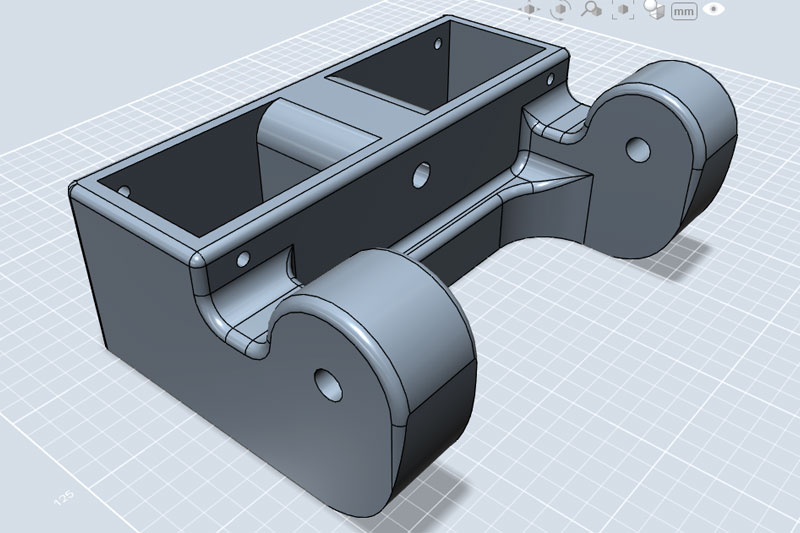


The two parts below fit in between the two rounded pivots on the main thigh parts above. As well as having a hole for 8mm studding which will allow the legs to rotate in a vertical axis, they have two further holes which take 6mm studding so they can be linked to two more similar modules higher up (which will also rotate around the 8mm studding). Those higher two modules will have servos mounted on them which drive the ‘handles’ on the outside of the main hip parts.



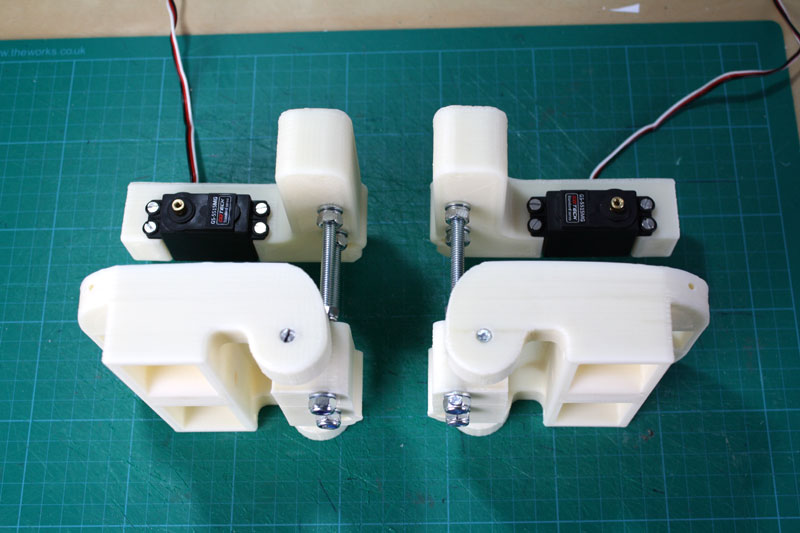
These are the next two modules up, which align with the smaller modules above using M6 studding through the two smallest holes. The larger holes are for the M8 studding that allows each piece to rotate vertically. These parts each hold one servo which links to the handles on the larger/main hip parts.



Here are some pictures of the three parts assembled:


I’ve designed a top and bottom plate that hold the vertical studding which the above parts rotate on:



And some more pictures of the hip parts together, the function of these parts will be explained in the video for this section:



Here are the custom servo levers to actuate the side-to–side lean of the android:



The next section will be the thighs…
Related Posts




About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More