Electronics Installation
This page is about the Electronics – check out the main project index for the rest. There are some YouTube videos about this section, scroll down for pictures and words:


I’m using the BTS 7960 motor driver to control the majority of the main motors. Each side of Ultron is driven from an Arduino Mega 2650. The motor drivers fit into the spine of Ultron, and the Arduinos go into each shoulder blade
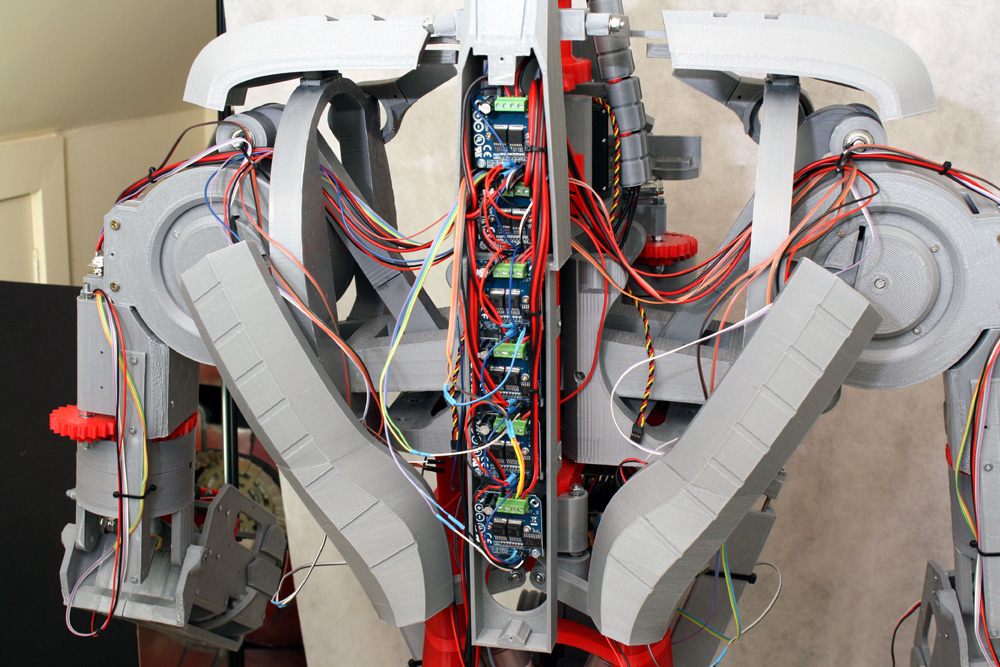
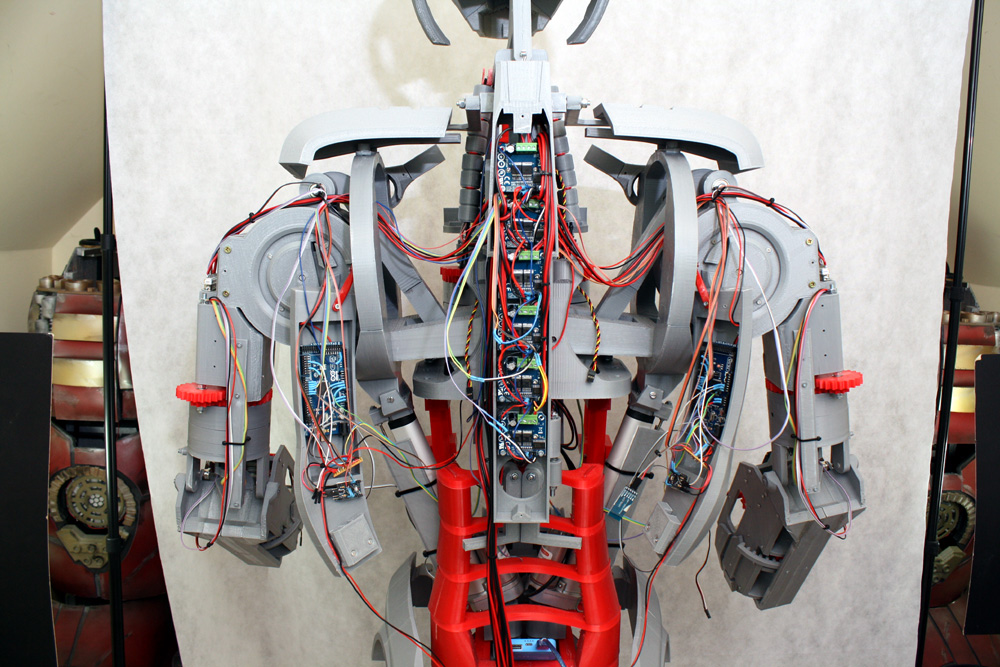

I’ve used 25-way D-range connectors on each arm so that the arms can be removed for transport. There is still some tidying up to do once I’ve wired in the rest:


I’ve installed lighting and force feedback in the joints, check out the videos above for more details:









About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More