Android 5
This my fifth android project, although the forth android, Killertron is still a current project. This will leave me two current projects to work on, Killertron is pneumatic, while this project will be driven by electric actuators.
This android will be similar to Discotron and Killertron in that again, it will have legs with two parallel sections. However this time is will be more ‘boxy’ so that the mechanics are inside the legs.
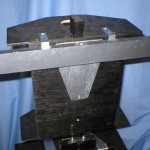
So far I have only made the parellel parts of the legs and the knee that they attach to:

The legs will be driven by low cost linear actuators which will operate on a ‘screw mechanicsm’ driven by cordless screwdriver motors. These will be detailed in a seperate article as they have many other uses.
First I need to make the ankles and hips (tops and bottoms of legs) so that I can see how much travel I need in the actuators. The legs assembled so far:

19/2/05
Today I have made parts of the the ankles and hips that allow the legs to lean side to side. All the parts so far are made from wood:

Here they are painted and attached to one of the feet:

Top view:

These parts attach to the existing legs, here’s everything assembled so far:

Next will be the rest of the hips that allow the legs to turn so it can walk around corners etc, and also join the legs to the body.
20/2/05
Today I have made the hips and ‘spine’. The spine will hold have shelves attached to hold all the electronics etc. Here are the parts unpainted:

The parellel parts at the tops of the legs are spaced apart with locking nuts on a 10mm threaded rod:

Here’s everything put together, the Tango can is there to show the size of it (couldn’t find a Coke can). So far it is 1.25m (49in) tall to the top of the spine – the head will go on there making it nearly 5ft tall:

A closer look at the legs:

Here’s a close up of the hip assembly:

The legs can turn so they can split apart so the adroid can walk around corners, here it is crouching down, it won’t be able to do this when the actuators are fitted, just for now the legs are hollow:

Next is the linear actuator construction which I shall detail in a separate article.
05/03/05
The low cost Linear actuator article has now been written, there will be 8 actuators attached to the android, so far I have made two:

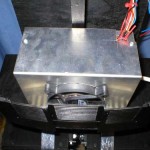
I have also made a ‘body’ which will hold the power supply and the control electronics. The power supply is an old AT PC power supply fitted into a lighter aluminium case. This will deliver 5v at 20Amps which will drive the motors, and 12v at 5Amps which will power the electronics:

06/03/05
Spent most of the day building the parts for the other 6 actuators, almost there:

08/03/05
Here are the actuators all made, now have to attach them to the android:

09/03/05
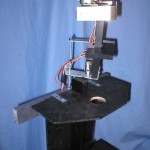
Today I have added the rest of the actuators to the android:

They are not wired to anything currently but can be operated manually:

Few bits to adjust but it can lean enough to stand on one leg:

Here is the android posed on one leg:

12/03/05
Today I have started to build a few extra skeleton bits to the android so I can get a feel for it’s finished weight and how it will react in motion. First I made this piece out of wood and sprayed it silver:

This attaches to the back of the android and is will hold the arms on – it’s a bit like shoulder blades:
It also holds the head on, the whole thing will be removable so that the head/shoulder/arm assembly can be tested independently or moved to another mobile base in the future:
I also thought about the cosmetics of the body and thought it would be a good idea to make some body panels, then I can build the electronics inside and make sure they are accessible from the outside, fit any switches and lights to something etc. I’ve had this old Compaq server lying around for a while:

It has a front door with another clear door in it to access the drives:

So I cut it up:

Cut it again and sprayed half silver & half black:

It will be fitted to the front of the android like this:

The power supply fan lines up with the bottom grill perfectly:
So it looks like this (with it’s head on from the head project):

26/03/05
I have now added some of the control electronics to the android. This is covered in more detail in the article ‘Positioning joints with DC motors’. I have placed the assembled modules in each leg and cabled them all up:

The motors and position sensors are wired to the boards, the power for the circuits, motors and position reference voltages run up to the body:

So now it looks like this, it is almost 5ft tall with it’s head on pictured previously (and it’s legs bent).

Looks like I’m going to lose the on board power supply as it’s only capable of 20A at 5v to run the motors which is pushing it a bit. I have found another power supply solution which I will detail separately – this will deliver about 60A at 5v but will be too big and heavy to have on board. It also provides 12v at 20A so this will be more than enough to run the control system and even an on board PC which there is now space for in the body.
Related Posts




About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More