Android 1
I decided to make my own life size android, this was my first attempt…
So, my plan became to create something with the requirements as below:
To be near human sized.
To walk on two legs, be able to turn corners, maybe navigate stairs.
To have human features such as two arms and a head in the right place.
To speak in English.
To see with ‘freaky eyes’.
Have a degree of intelligence in the future depending on how my software skills go.
Not to be too expensive, a few ?hundred.
Will probably have ‘off board’ power and processing until I can get some good batteries and an old laptop to tear apart.
After many hours just thinking about it I decided to draw my ideas down as I often forgot after a few pints and then remembered again later. The main concept seems to now be:
Each leg will extend or retract in a single motion so that the foot always stays parallel with the ground like a jack in a box.
Each leg will swivel with the hips so that it can turn on either leg to put one foot in front of the other.
The body will swivel on top of this so that it can turn either way and always face forwards as it’s walking.
The body will also lean side-to-side so that it can keep balance while the other leg is off the ground.
Mainly make it out of wood and aluminium sheeting due to cost, weight and ease to cut and machine.
My ideas for actuators so it can move are:
Springs / bungee cords (more on that later)
Low voltage power tools such as cordless screwdrivers due to low cost and the amount of torque.
Car central locking motors as a cheap, easy to operate electric piston, also quite strong.
18/1/04
The legs – So, I made a leg, after some time playing with bits of card and those paper-fasteners that we used to have at school. It has no foot yet but will have an additional piece in the lower leg like a goat has in order to keep the foot parallel with the ground as the leg bends. Each joint has a metal tube through the middle section of wood so that the bolts are rubbing against metal where they need to move, then I can oil them etc.

The leg will be sprung straight, with a sort of winch with lots of pulleys to bend it, powered by a cordless drill motor which already has lots of gears and good torque. My original test for angles is this:

When the top of the leg is attached to ‘something’, the ‘something’ will swivel with the hip around a vertical axis. I found these cheap bearings for skateboard wheels which are quite strong as you would effectively have to stand on them, this will reduce friction so my central door locking motors will be able to turn the rest of the android whilst it is standing on one leg to put the other foot forward:

24/1/04
I have now made the other leg and the swivelling part of the hips that are attached to the top of the legs. When the feet are fitted they will always be parallel with hips so that even with bent legs the torso will always be upright.

Got a couple of Central locking motors to play with, unfortunately they don’t have very much travel so we’ll have to see if they swivel the legs ok, might have to use them for something else…

25/1/4
Made the feet, they will be bigger with rubber pads on the bottom, not sure how much bigger yet – have to see when the rest is made. Also started the hip assembly which will have the bearings in so the legs can swivel round. It seems to stand up quite well as long as the centre of gravity is kept forward, even without the legs sprung straight yet.

A bit later today… Now I have bolted the hip assembly on (will need refitting later). Put some cable ties on to hold the legs straight just so I could test balance and it seems to be excellent… It stands up fine:

The swivelling hip assembly, the bearings are top and bottom of the hip section but will need something better to hold them in place:

1/02/04
This week I have built various extra stages to the android and thought about balance. I have also named it ‘Project Pinocchio’ due to it’s wooden appearance.

Its body is made so that the ‘shoulders’ will always stay parallel with the hips as it leans from side to side. It also has a ‘cradle’ hanging under this which moves further still in each direction so that it can put its balance over each leg, but still keeping it’s centre of gravity low enough that it doesn’t fall over.
This cradle will eventually hold the batteries and the on board computer once I find a laptop to tear apart

It is very tall – around 6’7”. Like anything I make it is too big to fit through doorways.

I have added bungee cords to the legs to hold them straight for now as I’m not sure now many Newtons of force I need to stretch some springs which mean I can’t order any for now. (Might take them from some deck chairs). I’ve also modified the swivelling parts of the hips to hold electric drill motors that will winch each leg up, pulling against the springs.
The head is made from a mask I found for now, just to give it some character. The head it mounted on 3 electric car central locking motors so it can move around, it will also eventually turn from side to side.

15/2/04
I have done quite a lot of work on my android in the last two weeks. The whole thing is getting heavier, I’ve rethought the legs so that they are strong enough to work. The bungee now pulls the leg bent (against gravity), the motor now pulls the leg straight (with gravity). This puts less load on the motor and the gear ratio of the motor is strong enough to hold the leg straight without any power applied:

Also made the feet bigger so it’s easier to balance:

I’ve fitted a whole desktop PC into the android including the power supply. The power was going to come down a really long cable but it didn’t work with long wires for some reason so I ended up just fitting it on board and running the mains straight to it. The PC is an AMD K6-450 (that used to be used by Trevor at Fire Records), I’ve put 96Mb RAM in it and a 4.3Gb disc. It runs Windows XP quite happily. It has a10/100 network card, 3 parallel ports (more on that later), USB and 2x serial ports, I need to add a small sound card also. Eventually I’ll replace the network card with a bluetooth / Wi-Fi device.

Close up of the PC and cards:

My head has gone for now, I’ve used the car door lock motors for the wrists as I have started to build the arms. They will move outwards to shift weight from side to side, also rotate and move up and down at the elbow. Still need to think about hands…

I can view the onboard PC with VNC or PCAnywhere so I can remote control it, might fit just a numeric keypad to the android for numeric input to the control software. It also has a built in web-server to look through the web cam which will eventually be part of the head. The ‘remote desktop’ below:

28/2/04
I have started work on the hands, eventually they will be driven by ‘radio control’ servos, they will be controlled from a PC serial interface:

I have also made a pan and tilt assembly for the head. Found a better mask to use which will leave me space for a mechanical jaw if I want one:

The mask:
Swivelled; there is room for a speaker and jaw assembly under the mask, the web cam is now in it’s eye:

Here it is all together, I’ve moved the legs closer together so it has more chance of displacing weight onto one leg :

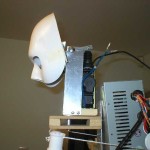
It will just about stand on one leg, although is in ‘freeze frame’. When it’s actually moving it should be fine as the momentum of swinging side to side will help tip it onto one leg. I have fitted a motor with a big rubber wheel which pushes the middle of it’s body to each side, so now the PC power supply is on it’s head as there was no space left in it’s middle:

*This project has now ended – see the Android2 pages for info*
Related Posts




About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More