Mobile Robotics Navigation Project: About the Hardware
Mobile Robotics Navigation – the 914 PC-BOT Hardware
This page is about the hardware I will be using for my project, check out the project index for the rest.
There are some YouTube videos about the background and motivation for this project, or scroll down for pictures and words


I have owned a 914 PC-BOT from White Box Robotics for several years. This is an all-in-one commercial grade mobile robot which carries an on board mini-itx computer and an array of sensors. As the PC-BOT uses standard PC Parts such as 5.25″ peripherals, you can slot in parts bought from your local computer shop and upgrade it’s processing power with off the shelf parts.



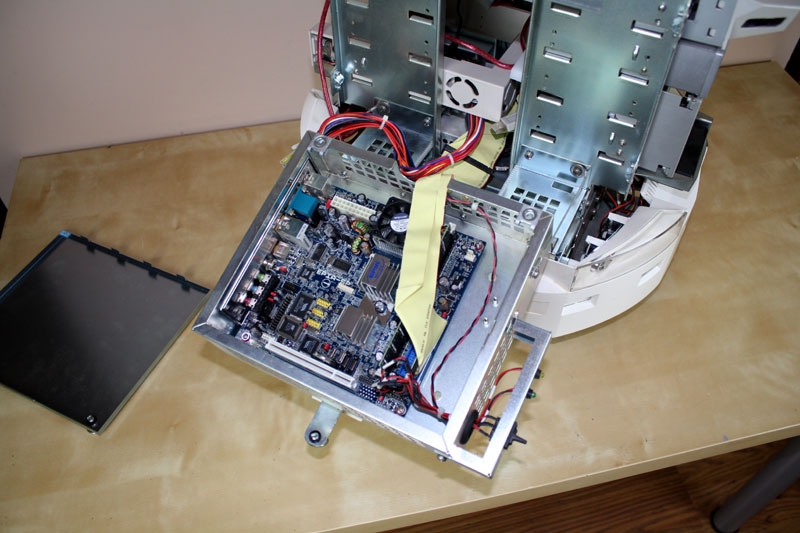
With the plastic shells removed we can see the 5.25″ drive bay peripherals mounted in the front and rear, the main metal chassis, and two cages for electronics which fold down on each side:



The left hand cage holds two M2-ATX DC-DC power supplies which take power from the main batteries installed in the base and provide a variety of clean voltage rails to power the on board PC and other devices. The right hand cage carries the mini-ITX board itself. I currently have a Via C7 core mini-itx board installed, although this is several years old now and really needs upgrading.
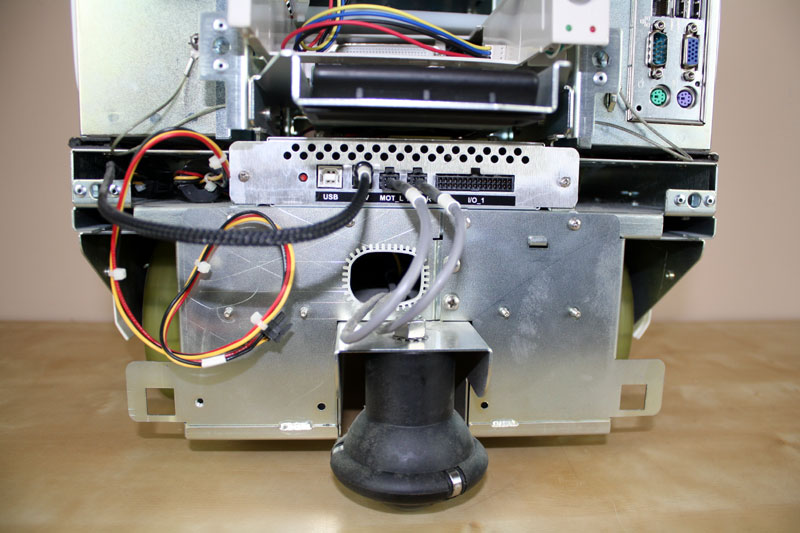
The PC-BOT uses a custom controller know as the M3 board. The M3 controls a pair of stepper motors which drive the robot, as well as reading the Sharp IR sensors mounted in the skirt and switching several lights/outputs mounted around the robot. the M3 is a USB device which uses PMD3410 industrial grade stepper motor driver chips.

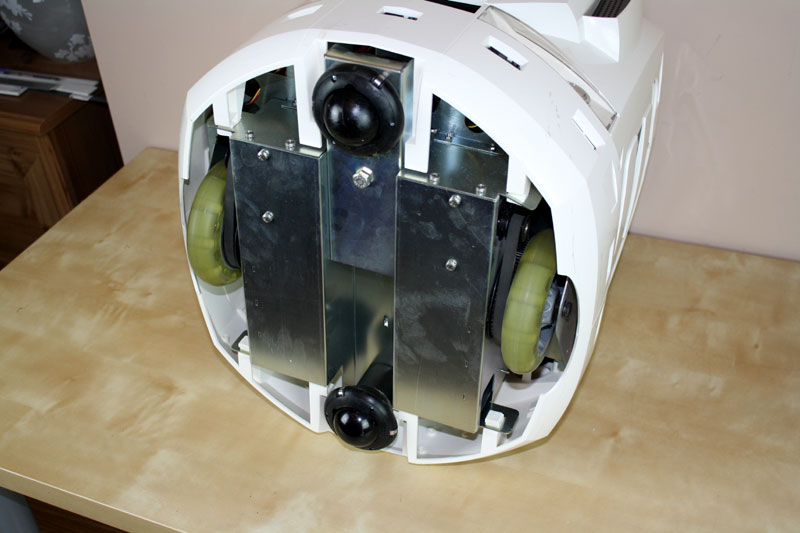
Underneath we can see two main drive wheels, and two ball castors – one of which is on a suspension arm so the PC-BOT can drive over lumps and bumps without getting stuck:


The PC-BOT is equipped with five sharp IR proximity sensors in its skirt, and three facing downwards installed in the front top 5.25″ drive bay. These are ok for basic tasks, but there are now far better sensors to use such as the Microsoft Kinect which is cheap and can sense depth as well as 2D images. As the mini-itx board I have installed is also several years old I will be using my Intel Atom netbook for most of the processing until such time that I can upgrade the mini-itx board:


Related Posts


About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More